Machine Learning Algorithms
Laser guided vehicle (LGV) Vision sensor를 통한 팔레트(pallet) 정밀 위치 인식 시스템 개발
- With 한화시스템, 한화기계
- 2019-10-26 ~ 2019-12-18
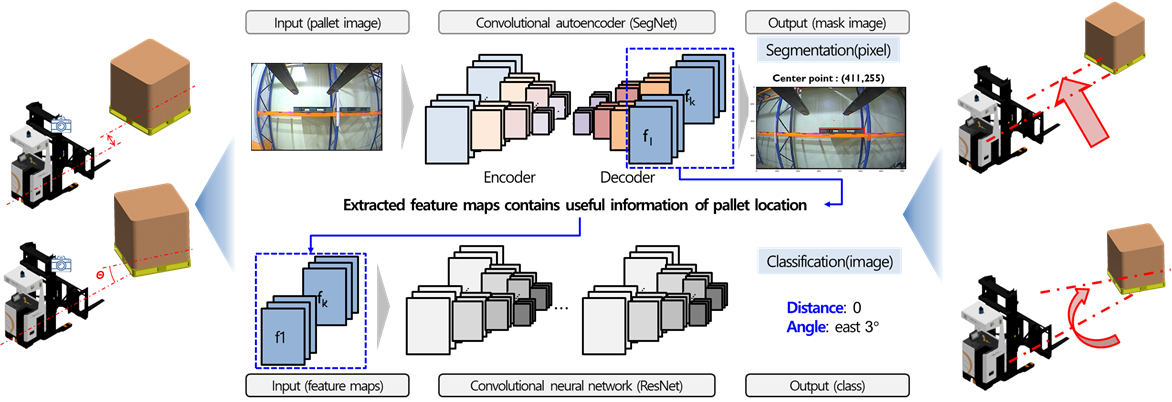
본 프로젝트에서는 자동화 물류 창고 내 LGV(laser guided vehicle) Vision sensor 기반 팔레트(pallet) 정밀위치 인식 시스템을 개발하였다. 정밀위치는 LGV 가 팔레트 이동을 위해 LGV fork(지게차 팔)를 삽입해야하는 위치를 말하며 LGV Vision sensor로부터 수집되는 팔레트 이미지 데이터를 수집하였다. 이후 팔레트 정밀위치 인식을 위해 Segmentation 기법 (SegNet - Deep convolutional encoder-decoder)을 적용하였고, 인식된 정밀위치를 기반으로 LGV 이동 기준 (1) 좌우로 얼만큼 이동해야하는지 나타내는 거리, (2) 얼만큼 방향을 틀어야하는지 각도를 예측하였다. 인식된 정밀위치 이미지를 기반으로 Classification 기법(Convolutional neural network)을 적용하였다. 그 결과, 팔레트 정밀위치를 높은 인식률로 예측하였고, 이동기준을 정확히 제시하였다.